So, somebody asked me the other day how all this started. My hobby was to fix smartphones, just for fun. I will get broken phones from my friends and I will open them up, see if I can learn something from them and try to figure out how to fix them, but after the 20th phone, I grew tired of it.
I was looking for a new hobby something fresh, something different, one day I just got a digital copy of Wired Magazine from a friend and I found a really interesting article titled "Here Comes the Drones", I think I read it like 5 times, kept thinking about it, and I start talking about it a lot, showing the article to a lot of people, I thought I found exactly what I wanted to do.
While I was talking about the idea to build one, a colleague from work , Roberto, asked me if he can be part of it, I thought it was a good idea, actually it was the best idea, honestly if it wasn't for him maybe I would it left the project in just that a project that I didn't finish, but Roberto's energy and enthusiasm kept us going, we talked about creating a log, a journal of everything that we do, and he came up with this blog.
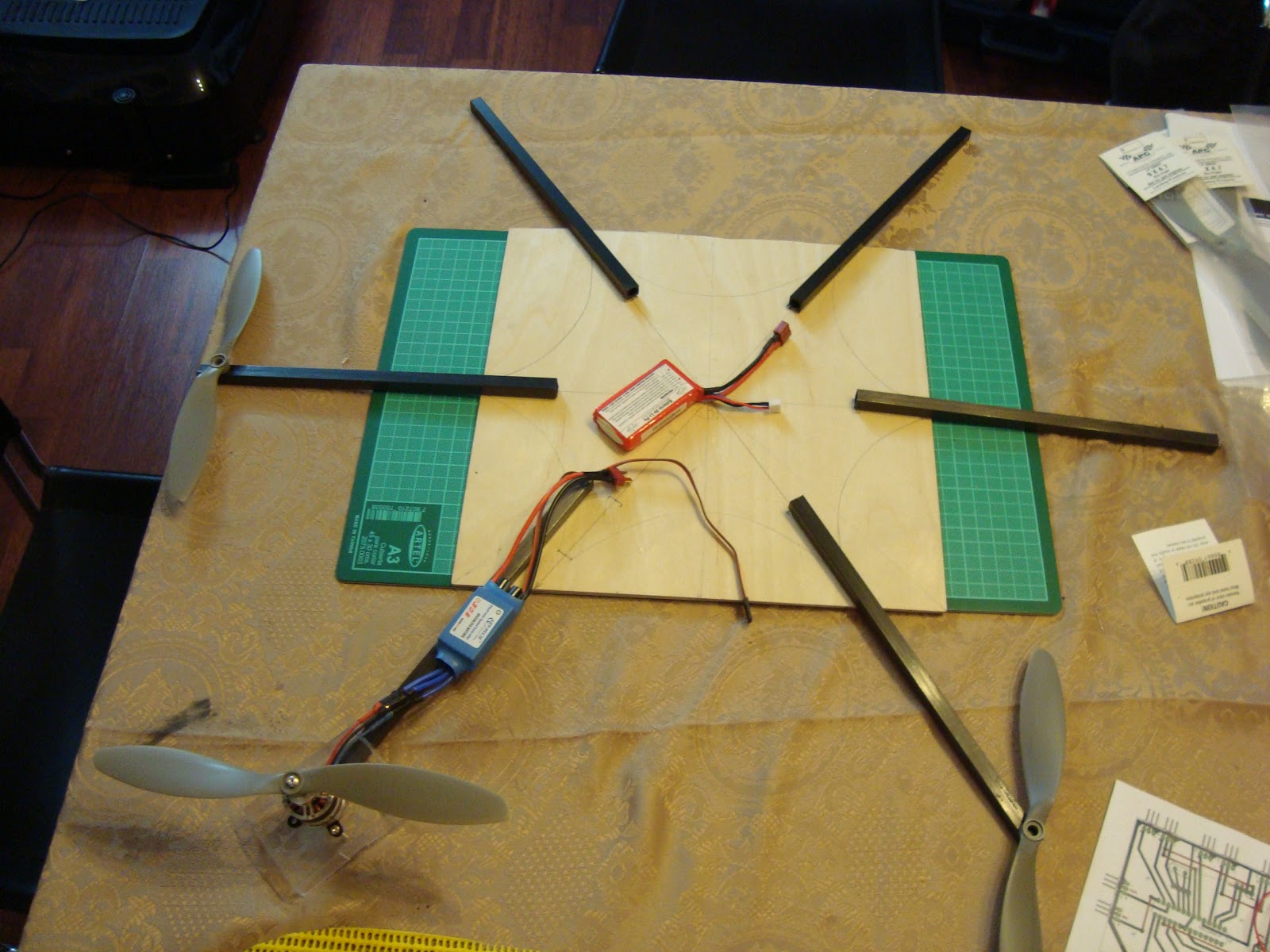
I thought to make it all of plywood as some models I saw on the net. I got a clear idea of how I wanted to look like, but Roberto had a better idea as he researched the fiber carbon tubes, it made it lighter, we still used the center wheel made in wood.
Roberto has been doing all the electronics, I am really rusty in this part, the more we work on it, the more things we want to add and see if they work or not, I got some IR proximity sensors and we will see if we can add it to the project.
We hope this blog helps people who are interested in building an Hexacopter from scratch, the most important part is....Enjoy!
Friday, December 28, 2012
Wednesday, December 12, 2012
Research
We will post here all resources from the net that we got ideas from or that we learn from.
Balance Filters:
http://web.mit.edu/scolton/www/filter.pdf
Kalman Filter:
http://arduino.cc/forum/index.php/topic,58048.0.html
http://www.instructables.com/id/Guide-to-gyro-and-accelerometer-with-Arduino-inclu/
http://en.wikipedia.org/wiki/Kalman_filter
ESC Calibration:
http://code.google.com/p/
Stabilization System:
http://technicaladventure.
http://diydrones.com/forum/topics/quadcopter-control-function-layers
Balance Filters:
http://web.mit.edu/scolton/www/filter.pdf
Kalman Filter:
http://arduino.cc/forum/index.php/topic,58048.0.html
http://www.instructables.com/id/Guide-to-gyro-and-accelerometer-with-Arduino-inclu/
http://en.wikipedia.org/wiki/Kalman_filter
ESC Calibration:
http://code.google.com/p/
Stabilization System:
http://technicaladventure.
http://diydrones.com/forum/topics/quadcopter-control-function-layers
Some values for reference:
ITG-3200 Triple Axis Gyro:
ADXL345 Accelerometer:
http://www.sparkfun.com/tutorials/240
6 Degrees of Freedom - Sparkfun:
http://bildr.org/2012/03/stable-orientation-digital-imu-6dof-arduino/
6 Degrees of Freedom - Sparkfun:
http://bildr.org/2012/03/stable-orientation-digital-imu-6dof-arduino/
Arduino - Adding more interrupts To Read More RC Channels:
DJI Flame Wheel:
Understanding how Accelerometers and Gyros work:
Eagle: Schematics
and libraries:
Burning the bootloader to the ATMEGA chip:
Controlling the ESCs using the Arduino Servo.h library:
Understanding PPM (in order to read the R/C channels and write to the ESCs):
Tuesday, December 11, 2012
HW and SW Tests
We are using a DJI F550 frame to test the electronics and our first version of software (actually, 2 frames are being used... :)
Once we have both working well, then it will be installed on the frame we are building.



Comparing the frames:

First test. Testing the PCB with the ATMEGA328 chip:
The electronics works! And apparently the first idea on how the microcontroller controls the hexa works too.
This test was made without calibrating any of the ESCs. We can notice that there is a small difference in the response between them. Next step will be calibrating the ESCs.
Once we have both working well, then it will be installed on the frame we are building.
Comparing the frames:
First test. Testing the PCB with the ATMEGA328 chip:
The electronics works! And apparently the first idea on how the microcontroller controls the hexa works too.
This test was made without calibrating any of the ESCs. We can notice that there is a small difference in the response between them. Next step will be calibrating the ESCs.
Shopping List
(2) Carbon Fiber tubes 1cm by 1cm [cost USD / CLP]
(2) Plywood [cost USD / CLP]
(1) Balsa Block 3x3x12 [cost USD / CLP]
(12) screws [cost USD / CLP]
(12) nuts [cost USD / CLP]
(2) 12 gauge cable [cost USD / CLP]
(1) battery 3200mAh 11.1v 3 LI-PO [cost USD / 39000 CLP]
(6) ESC TURNIGY Plush 30amp Speed Controller [11.91 USD / CLP]
(6) Turnigy Park480 Brushless Outrunner 850kv [19.37 USD / CLP]
(3) CW Blades / Regular Blades [cost USD / 1200 CLP]
(3) CCW Blades / Reverse Blades [cost USD / 2000 CLP]
Customs Import Taxes
(2) Plywood [cost USD / CLP]
(1) Balsa Block 3x3x12 [cost USD / CLP]
(12) screws [cost USD / CLP]
(12) nuts [cost USD / CLP]
(2) 12 gauge cable [cost USD / CLP]
(1) battery 3200mAh 11.1v 3 LI-PO [cost USD / 39000 CLP]
(6) ESC TURNIGY Plush 30amp Speed Controller [11.91 USD / CLP]
(6) Turnigy Park480 Brushless Outrunner 850kv [19.37 USD / CLP]
(3) CW Blades / Regular Blades [cost USD / 1200 CLP]
(3) CCW Blades / Reverse Blades [cost USD / 2000 CLP]
Customs Import Taxes
Monday, December 10, 2012






















Subscribe to:
Comments (Atom)